A new study in
Nature reports that two people with tetraplegia were able to reach for and grasp objects in three-dimensional space using robotic arms that they controlled directly with brain activity. They used the BrainGate neural interface system, an investigational device currently being studied under an
Investigational Device Exemption. One participant used the system to
serve herself coffee for the first time since becoming paralyzed nearly
15 years ago.
 |
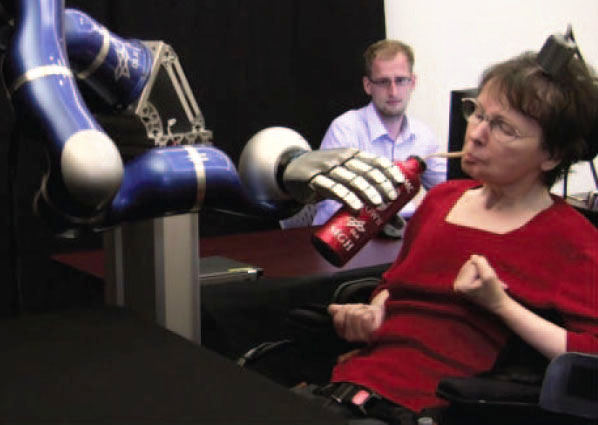
One small step
A
58-year-old woman, paralyzed by a stroke for almost 15 years, uses her
thoughts to control a robotic arm, grasp a bottle of coffee, serve
herself a drink, and return the bottle to the table.
|
PROVIDENCE, R.I. [Brown University] — On April 12,
2011, nearly 15 years after she became paralyzed and unable to speak, a
woman controlled a robotic arm by thinking about moving her arm and
hand to lift a bottle of coffee to her mouth and take a drink. That
achievement is one of the advances in brain-computer interfaces,
restorative neurotechnology, and assistive robot technology described in
the May 17 edition of the journal
Nature by the BrainGate2
collaboration of researchers at the Department of Veterans Affairs,
Brown University, Massachusetts General Hospital, Harvard Medical
School, and the German Aerospace Center (DLR).
A 58-year-old woman (“S3”) and a 66-year-old man (“T2”) participated
in the study. They had each been paralyzed by a brainstem stroke years
earlier which left them with no functional control of their limbs. In
the research, the participants used neural activity to directly control
two different robotic arms, one developed by the DLR Institute of
Robotics and Mechatronics and the other by DEKA Research and Development
Corp., to perform reaching and grasping tasks across a broad
three-dimensional space. The BrainGate2 pilot clinical trial employs the
investigational BrainGate system initially developed at Brown
University, in which a baby aspirin-sized device with a grid of 96 tiny
electrodes is implanted in the motor cortex — a part of the brain that
is involved in voluntary movement. The electrodes are close enough to
individual neurons to record the neural activity associated with
intended movement. An external computer translates the pattern of
impulses across a population of neurons into commands to operate
assistive devices, such as the DLR and DEKA robot arms used in the study
now reported in Nature.
BrainGate participants have previously demonstrated neurally based
two-dimensional point-and-click control of a cursor on a computer screen
and rudimentary control of simple robotic devices.
The study represents the first demonstration and the first
peer-reviewed report of people with tetraplegia using brain signals to
control a robotic arm in three-dimensional space to complete a task
usually performed by their arm. Specifically, S3 and T2 controlled the
arms to reach for and grasp foam targets that were placed in front of
them using flexible supports. In addition, S3 used the DLR robot to
pick up a bottle of coffee, bring it to her mouth, issue a command to
tip it, drink through a straw, and return the bottle to the table. Her
BrainGate-enabled, robotic-arm control during the drinking task required
a combination of two-dimensional movements across a table top plus a
“grasp” command to either grasp and lift or tilt the robotic hand.
“Our goal in this research is to develop technology that will restore
independence and mobility for people with paralysis or limb loss,” said
lead author Dr. Leigh Hochberg, a neuroengineer and critical care
neurologist who holds appointments at the Department of Veterans
Affairs, Brown University, Massachusetts General Hospital, and Harvard.
He is the sponsor-investigator for the BrainGate2 pilot clinical trial.
“We have much more work to do, but the encouraging progress of this
research is demonstrated not only in the reach-and-grasp data, but even
more so in S3’s smile when she served herself coffee of her own volition
for the first time in almost 15 years.”
 |
Leigh Hochberg
Even
after nearly 15 years, a part of the brain essentially “disconnected”
from its
original target by a brainstem stroke was still able to direct
the complex,
multidimensional movement of an external arm. |
Partial
funding for this work comes from the VA, which is committed to
improving the lives of injured veterans. “VA is honored to have played a
role in this exciting and promising area of research,” said VA
Secretary Eric Shinseki. “Today’s announcement represents a great step
forward toward improving the quality of life for veterans and others who
have either lost limbs or are paralyzed.”
Hochberg adds that even after nearly 15 years, a part of the brain
essentially “disconnected” from its original target by a brainstem
stroke was still able to direct the complex, multidimensional movement
of an external arm — in this case, a robotic limb. The researchers also
noted that S3 was able to perform the tasks more than five years after
the investigational BrainGate electrode array was implanted. This sets a
new benchmark for how long implanted brain-computer interface
electrodes have remained viable and provided useful command signals.
John Donoghue, the VA and Brown neuroscientist who pioneered
BrainGate more than a decade ago and who is co-senior author of the
study, said the paper shows how far the field of brain-computer
interfaces has come since the first demonstrations of computer control
with BrainGate.
“This paper reports an important advance by rigorously demonstrating
in more than one participant that precise three-dimensional neural
control of robot arms is not only possible, but also repeatable,” said
Donoghue, who directs the Brown Institute for Brain Science. “We’ve
moved significantly closer to returning everyday functions, like serving
yourself a sip of coffee, usually performed effortlessly by the arm and
hand, for people who are unable to move their own limbs. We are also
encouraged to see useful control more than five years after implant of
the BrainGate array in one of our participants. This work is a critical
step toward realizing the long-term goal of creating a neurotechnology
that will restore movement, control, and independence to people with
paralysis or limb loss.”
In the research, the robots acted as a substitute for each
participant’s paralyzed arm. The robotic arms responded to the
participants’ intent to move as they imagined reaching for each foam
target. The robot hand grasped the target when the participants imagined
a hand squeeze. Because the diameter of the targets was more than half
the width of the robot hand openings, the task required the participants
to exert precise control. (Videos of these actions are available on the
Nature website.)
 |
John Donoghue
“We’ve
moved significantly closer to returning everyday functions, like
serving yourself
a sip of coffee, usually performed effortlessly by the
arm and hand, for people who are
unable to move their own limbs.” |
In
158 trials over four days, S3 was able to touch the target within an
allotted time in 48.8 percent of the cases using the DLR robotic arm and
hand and 69.2 percent of the cases with the DEKA arm and hand, which
has the wider grasp. In 45 trials using the DEKA arm, T2 touched the
target 95.6 percent of the time. Of the successful touches, S3 grasped
the target 43.6 percent of the time with the DLR arm and 66.7 percent of
the time with the DEKA arm. T2’s grasp succeeded 62.2 percent of the
time.
T2 performed the session in this study on his fourth day of
interacting with the arm; the prior three sessions were focused on
system development. Using his eyes to indicate each letter, he later
described his control of the arm: “I just imagined moving my own arm and
the [DEKA] arm moved where I wanted it to go.”
The study used two advanced robotic arms: the DLR Light-Weight Robot
III with DLR five-fingered hand and the DEKA Arm System. The DLR
LWR-III, which is designed to assist in recreating actions like the
human arm and hand and to interact with human users, could be valuable
as an assistive robotic device for people with various disabilities.
Patrick van der Smagt, head of bionics and assistive robotics at DLR,
director of biomimetic robotics and machine learning labs at DLR and the
Technische Universität München, and a co-senior author on the paper
said: “This is what we were hoping for with this arm. We wanted to
create an arm that could be used intuitively by varying forms of
control. The arm is already in use by numerous research labs around the
world who use its unique interaction and safety capabilities. This is a
compelling demonstration of the potential utility of the arm by a person
with paralysis.”
DEKA Research and Development developed the DEKA Arm System for
amputees, through funding from the United States Defense Advanced
Research Projects Agency (DARPA). Dean Kamen, founder of DEKA said, “One
of our dreams for the Luke Arm [as the DEKA Arm System is known
informally] since its inception has been to provide a limb that could be
operated not only by external sensors, but also by more directly
thought-driven control. We’re pleased about these results and for the
continued research being done by the group at the VA, Brown and MGH.”
The research is aimed at learning how the DEKA arm might be controlled
directly from the brain, potentially allowing amputees to more naturally
control this prosthetic limb.
Over the last two years, VA has been conducting an optimization study
of the DEKA prosthetic arm at several sites, with the cooperation of
veterans and active duty service members who have lost an arm. Feedback
from the study is helping DEKA engineers to refine the artificial arm’s
design and function. “Brain-computer interfaces, such as BrainGate, have
the potential to provide an unprecedented level of functional control
over prosthetic arms of the future,” said Joel Kupersmith, M.D., VA
chief research and development officer. “This innovation is an example
of federal collaboration at its finest.”
 |
The BrainGate2 Neural Interface System
An
implanted microelectrode array, first used more than a decade ago,
detects brain signals which can be translated by a computer into machine
instructions, allowing control of robotic devices by thought. |
Story
Landis, director of the National Institute of Neurological Disorders
and Stroke, which funded the work in part, noted: “This technology was
made possible by decades of investment and research into how the brain
controls movement. It’s been thrilling to see the technology evolve
from studies of basic neurophysiology and move into clinical trials,
where it is showing significant promise for people with brain injuries
and disorders.”
In addition to Hochberg, Donoghue, and van der Smagt, other authors
on the paper are Daniel Bacher, Beata Jarosiewicz, Nicolas Masse, John
Simeral, Joern Vogel, Sami Haddadin, Jie Liu, and Sydney Cash.
Additional comments
Vincent Ng
Medical Center Director, Providence VA Medical Center
“The VA is on the forefront of translational research that’s improving
the quality of life for our Veterans who have sacrificed so much for our
Nation. We are proud to be a part of this exciting, collaborative
research.”
U.S. Sen. Sheldon Whitehouse
“I congratulate Brown University and the Providence VA Medical Center
for this ground-breaking project, which could help to significantly
improve the quality of life of disabled and paralyzed Americans,
including many veterans. The innovations produced in this new study
highlight the value of federal support for basic scientific research.”
U.S. Rep. David Cicilline
“I congratulate the entire Brown University community on the progress it
has made in this project. It is my hope that with continued success,
this advancement will help improve the quality of life for individuals
with disabilities, especially our men and women in uniform.”
Jennifer French
Executive Director, Neurotech Network
“This latest development in cortical control research has the potential
to revolutionize the way we interact with technology. More
specifically, the possibilities open a new level of independence for
those living with severe paralysis. Simple tasks like drinking, eating
or brushing your teeth are not possible for people living with severe
paralysis. The ability to perform these every-day tasks can create a new
world of independence for people with severe disabilities.”
R. John Davenport
Associate Director, Brown University Institute for Brain Science
“This exciting advance from the BrainGate team exemplifies the amazing
science that can only result when researchers from disparate disciplines
collaborate. The Institute works to link fundamental science,
engineering, and medicine among our more than 100 faculty members.”
The BrainGate2 study continues to enroll participants to take part in
this research and recently added Stanford University as a member of the
collaboration and a clinical trial site.
About the BrainGate collaboration
This advance is the result of the ongoing collaborative BrainGate
research at Brown University, Massachusetts General Hospital, Providence
VA Medical Center; researchers at Stanford University have recently
joined the collaboration as well. The BrainGate research team is focused
on developing and testing neuroscientifically inspired technologies to
improve the communication, mobility, and independence of people with
neurologic disorders, injury, or limb loss.
Funding for the study and its projects comes from the Rehabilitation
Research and Development Service, Office of Research and Development,
U.S. Department of Veterans Affairs, the National Institutes of Health
(some grants were funded all or in part through the American Recovery
and Reinvestment Act), the Eunice Kennedy Shriver National Institute of
Child Health and Human Development/National Center for Medical
Rehabilitation Research (HD53403, HD100018, HD063931), the National
Institute on Deafness and Other Communication Disorders, the National
Institute of Neurological Disorders and Stroke (NS025074), the National
Institute of Biomedical Imaging and Bioengineering (EB007401), the
Doris Duke Charitable Foundation, the MGH-Deane Institute for Integrated
Research on Atrial Fibrillation and Stroke, Katie Samson Foundation,
and the Craig H. Neilsen Foundation. The contents do not represent the
official views of the Department of Veterans Affairs or the United
States Government.
The implanted microelectrode array and associated neural recording
hardware used in the BrainGate research are manufactured by BlackRock
Microsystems LLC (Salt Lake City, Utah). The research prototype Gen2
DEKAarm was provided by DEKA Integrated Solutions Inc, under contract
from the Defense Advanced Research Project Agency (DARPA).
The BrainGate pilot clinical trial was previously directed by
Cyberkinetics Neurotechnology Systems Inc. Foxborough, Mass., (CKI). CKI
ceased operations in 2009, before the collection of data reported in
the Nature manuscript. The clinical trials of the BrainGate2 Neural
Interface System are now administered by Massachusetts General Hospital,
Boston, Mass. Donoghue is a former chief scientific officer and a
former director of CKI; he held stocks and received compensation.
Hochberg received research support from Massachusetts General and
Spaulding Rehabilitation Hospitals, which in turn received clinical
trial support from Cyberkinetics.
CAUTION: Investigational Device. Limited by Federal Law to
Investigational Use. The device is being studied under an IDE for the
detection and transmission of neural signals from the cortex to
externally powered communication systems, environmental control systems,
and assistive devices by persons unable to use their hands due to
physical impairment. The clinical trial is ongoing; results presented
are thus preliminary. The safety and effectiveness of the device have
not been established.
Press contacts
David Orenstein, Brown University,
david_orenstein@brown.edu, 401-527-2525
Mark Ballesteros, U.S. Dept. of Veterans Affairs,
Mark.Ballesteros@va.gov, 202-461-7559.
Michael Morrison, Massachusetts General Hospital,
mdmorrison@partners.org, 617-724-6425